

図は,他励直流電動機Mに歯車で結合された慣性モーメントJLと制動係数DLの負荷を駆動するサーボ系を示す。
ポテンショメータ1及び2で角度を電圧に変換しているが,その比例係数をkpとして,e1=kpθi,e2=kpθ0で表されるものとする。
また,電動機Mの回転子そのものの慣性モーメントをJM,制動係数をDM,電動機の逆起電力係数及びトルク係数をそれぞれke及びktとし,電機子巻線と増幅器との合成抵抗をRMとする。
さらに,歯車の歯車比は1:Nであり,歯車の慣性及び損失は無視できるものとする。
この場合,次の問に答えよ。
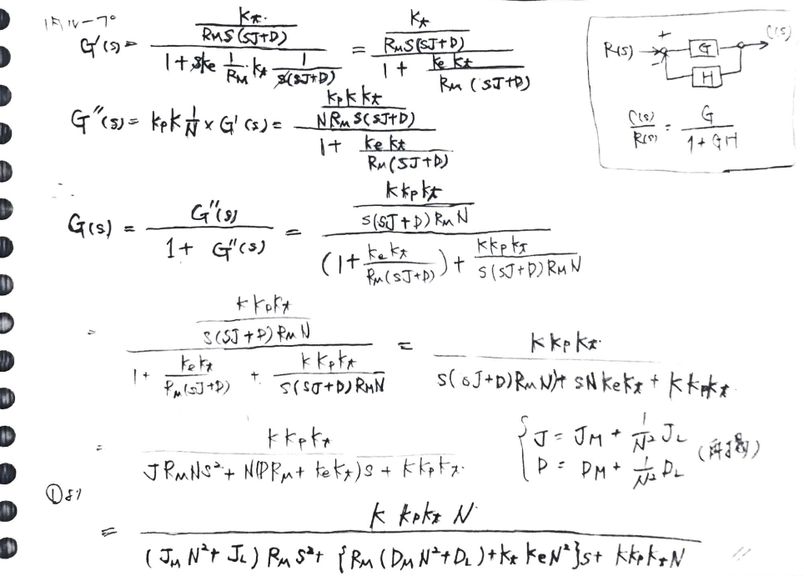
(1)このサーボ系における伝達関数G(s)=θ0(s)/θi(s)を求めよ。
(2)このサーボ系において,θi をステップ関数状に変化させたときの θ0 の応答が非振動的でしかも最も速い応答(臨界減衰応答)を示すときの増幅器Aの増幅度Kを求めよ。
○解答




コメントをお書きください